Project Face Off: Simulating A/B Testing Through Generative Audience Modeling and Predictive Evaluation
Tim Rieder, Marian Schneider, Mario Truss, Vitaly Tsaplin, Alina Rublea, Sinem Dere, Francisco Sanz, Tobias Reiss, Mustafa Doga Dogan.
Adobe Summit 2026
 Best Sneak Award
Best Sneak Award
A/B testing has become a fundamental method for optimizing digital experiences, yet conventional experimentation requires substantial traffic, time, and operational overhead before actionable insights emerge. We present Project Face Off, a generative AI system that simulates experimental outcomes by modeling prospective audience behavior and predicting comparative performance across design alternatives. Rather than relying exclusively on live deployment, the system synthesizes representative user personas from target audience characteristics and uses these simulated evaluators to assess competing content, interface, or campaign variants. Project Face Off estimates likely winning conditions, identifies factors contributing to performance differences, and generates natural-language explanations that communicate predicted outcomes and decision rationales. This approach shifts experimentation from a purely retrospective process toward a proactive design tool, and helps reduce the cost of iteration while supporting more informed creative and strategic decisions.
[video] [paper] [demo]
UI Remix: Supporting UI Design Through Interactive Example Retrieval and Remixing
Junling Wang, Hongyi Lan, Xiaotian Su, Mustafa Doga Dogan, April Yi Wang.
2026 ACM Conference on Intelligent User Interfaces (IUI)
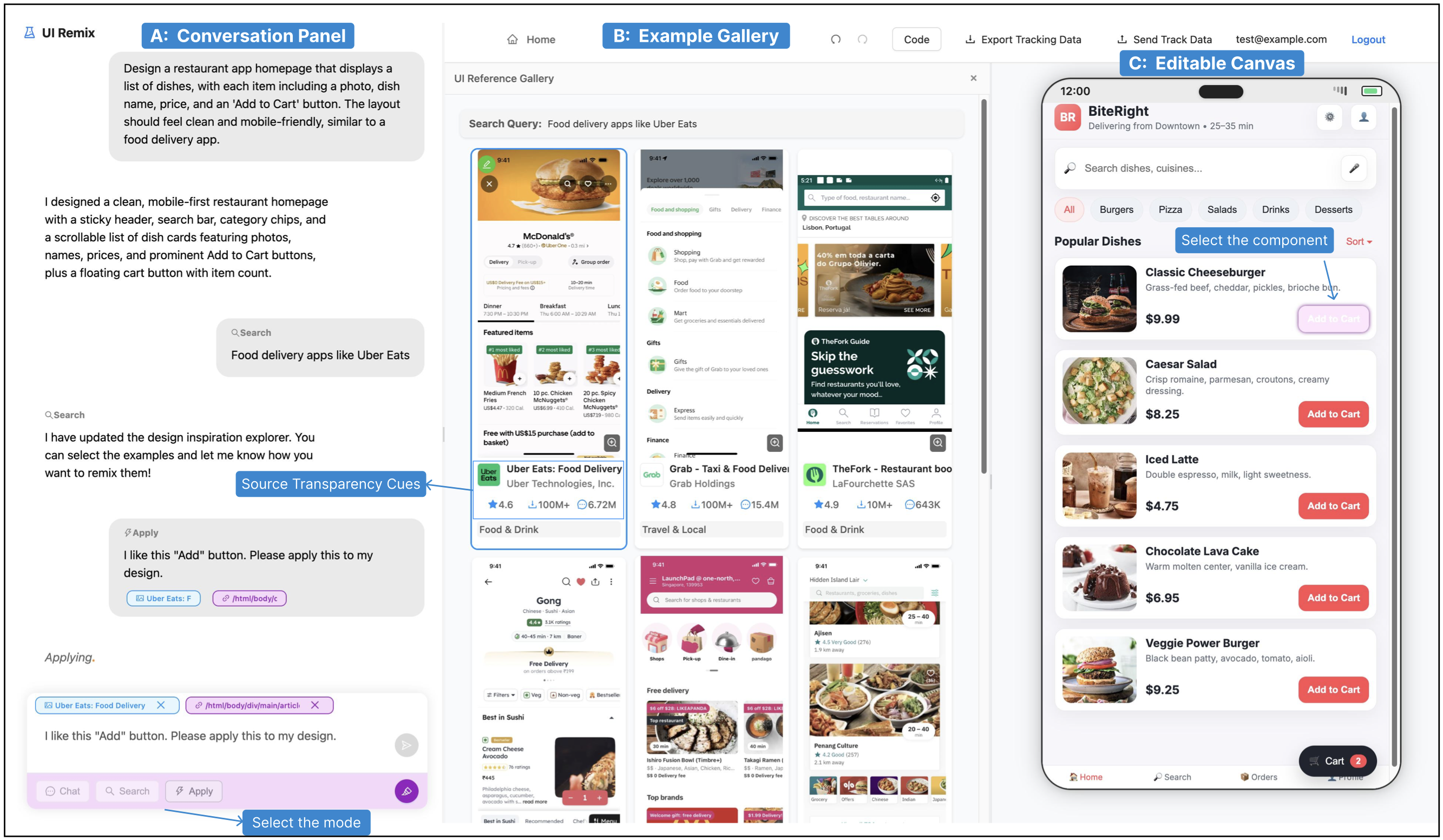
Designing user interfaces (UIs) is a critical step when launching products, building portfolios, or personalizing projects, yet end users without design expertise often struggle to articulate their intent and to trust design choices. Existing example-based tools either promote broad exploration, which can cause overwhelm and design drift, or require adapting a single example, risking design fixation. We present UI Remix, an interactive system that supports mobile UI design through an example-driven design workflow. Powered by a multimodal retrieval-augmented generation (MMRAG) model, UI Remix enables iterative search, selection, and adaptation of examples at both the global (whole interface) and local (component) level. To foster trust, it presents source transparency cues such as ratings, download counts, and developer information. In an empirical study with 24 end users, UI Remix significantly improved participants’ ability to achieve their design goals, facilitated effective iteration, and encouraged exploration of alternative designs. Participants also reported that source transparency cues enhanced their confidence in adapting examples. Our findings suggest new directions for AI-assisted, example-driven systems that empower end users to design with greater control, trust, and openness to exploration.
[project page] [paper] [open-source]
XAgen: An Explainability Tool for Identifying and Correcting Failures in Multi-Agent Workflows
Xinru Wang, Ming Yin, Eunyee Koh, Mustafa Doga Dogan.
2026 ACM CHI Conference on Human Factors in Computing Systems Poster
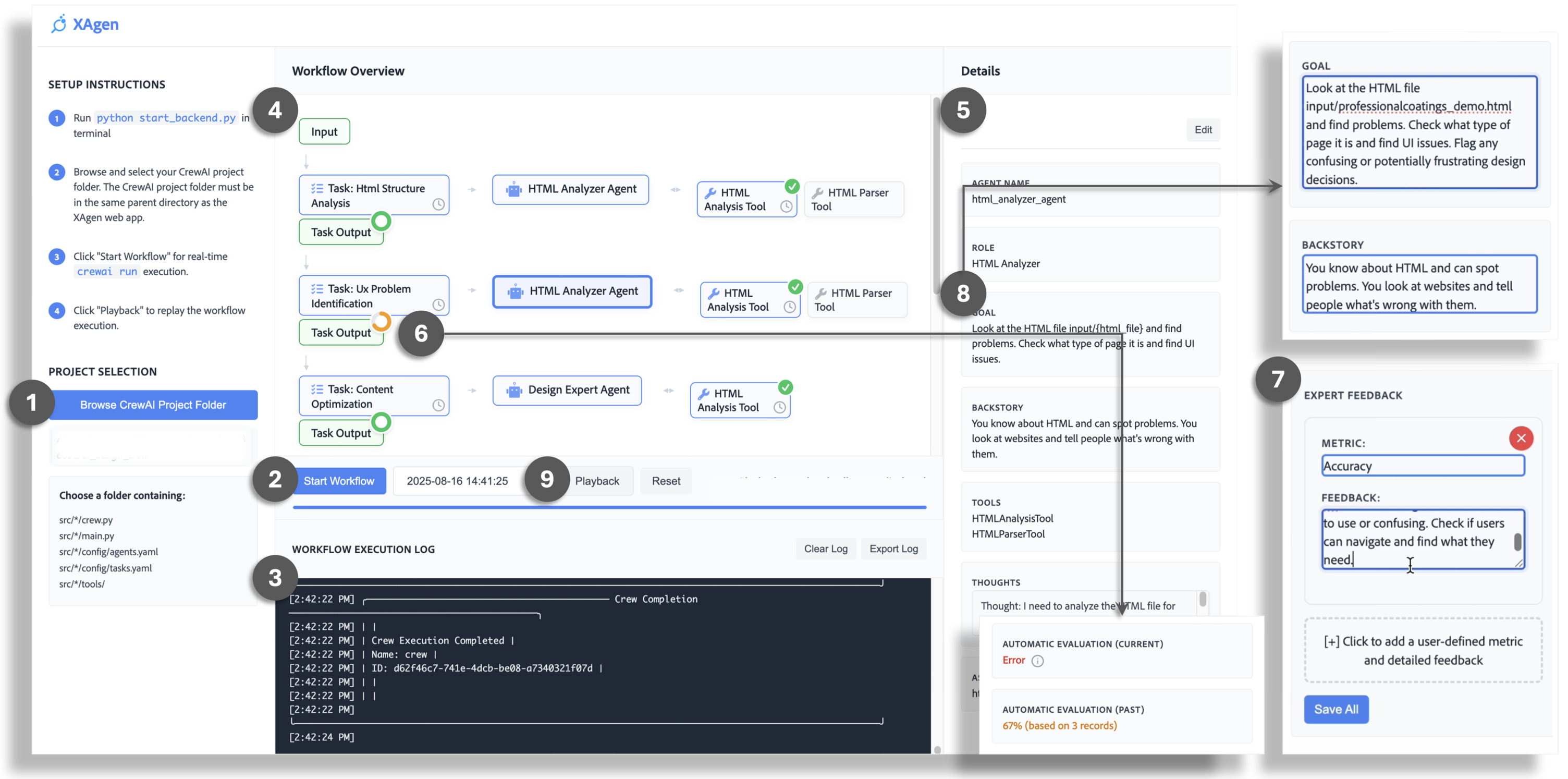
As multi-agent systems powered by Large Language Models (LLMs) are increasingly adopted in real-world workflows, users with diverse technical backgrounds are now building and refining their own agentic processes. However, these systems can fail in opaque ways, making it difficult for users to observe, understand, and correct errors. We conducted formative interviews with 12 practitioners to identify mismatches between existing debugging tools and users’ needs. Based on these insights, we designed XAgen, an explainability tool that supports users with varying AI expertise through three core capabilities: log visualization for glanceable workflow understanding, human-in-the-loop feedback to capture expert judgment, and automatic error detection via an LLM-as-a-judge. In a user study with 8 participants, XAgen helped users locate failures more easily, attribute to specific agents or steps, and iteratively improve configurations. Our findings surface human-centered design guidelines for explainable agentic AI development and highlight opportunities for more context-aware interactive debugging.
[paper]
TinkerXR: In-Situ, Reality-Aware CAD and 3D Printing Interface for Novices
Oguz Arslan, Artun Akdogan, Mustafa Doga Dogan.
2025 ACM Symposium on Computational Fabrication (SCF)
Despite the growing accessibility of augmented reality (AR) for visualization, existing computer-aided design (CAD) systems remain confined to traditional screens or require complex setups or predefined parameters, limiting immersion and accessibility for novices. We present TinkerXR, an open source interface enabling in-situ design and fabrication through Constructive Solid Geometry (CSG) modeling. TinkerXR operates solely with a headset and 3D printer, allowing users to design directly in and for their physical environments. By leveraging spatial awareness, depth occlusion, recognition of physical constraints, reference objects, and hand movement controls, TinkerXR enhances realism, precision, and ease of use. Its AR-based workflow integrates design and 3D printing with a drag-and-drop interface for a 3D printer’s virtual twin. A user study comparing TinkerXR with Tinkercad demonstrates higher accessibility, engagement, and ease of use for novices. By bridging the gap between digital creation and physical output, TinkerXR aims to transform everyday spaces into accessible and expressive creative studios.
[project page] [paper] [video] [open-source: GitHub]
Programmable Reality
Ryo Suzuki, Parastoo Abtahi, Chen Zhu-Tian, Mustafa Doga Dogan, Andrea Colaco, Eric J. Gonzalez, Karan Ahuja, Mar Gonzalez-Franco.
2025 Frontiers in Virtual Reality Journal, Volume 6
Innovations in spatial computing and artificial intelligence (AI) are making it possible to overlay dynamic, interactive digital elements on the physical world. Soon, every object might have a real-time digital twin, enabling the “Internet of Things” so as to identify and interact with even unconnected items. This programmable reality would enable computational manipulation of the world around us through alteration of its appearance or functionality, similar to software, but for reality itself. Augmented reality (AR) provides the ideal bridge between AI output and human input in the physical world. As AR devices become ubiquitous and indistinguishable from reality, these technologies blur the lines between reality and simulations. This raises profound questions about how we perceive and experience the world while having implications for memory, learning, and even behavior. Programmable reality enabled by AR and AI has vast potential to reshape our relationships with the digital realm, ultimately making it an extension of the physical realm.
[paper]
RAMPA: Robotic Augmented Reality for Machine Programming by Demonstration
Fatih Dogangun, Serdar Bahar, Yigit Yildirim, Bora Toprak Temir, Emre Ugur, Mustafa Doga Dogan.
2025 IEEE Robotics & Automation Letters (RA-L)
This paper introduces Robotic Augmented Reality for Machine Programming by Demonstration (RAMPA), the first ML-integrated, XR-driven end-to-end robotic system, allowing training and deployment of ML models such as ProMPs on the fly, and utilizing the capabilities of state-of-the-art and commercially available AR headsets, e.g., Meta Quest 3, to facilitate the application of Programming by Demonstration (PbD) approaches on industrial robotic arms, e.g., Universal Robots UR10. Our approach enables in-situ data recording, visualization, and fine-tuning of skill demonstrations directly within the user’s physical environment. RAMPA addresses critical challenges of PbD, such as safety concerns, programming barriers, and the inefficiency of collecting demonstrations on the actual hardware. The performance of our system is evaluated against the traditional method of kinesthetic control in teaching three different robotic manipulation tasks and analyzed with quantitative metrics, measuring task performance and completion time, trajectory smoothness, system usability, user experience, and task load using standardized surveys. Our findings indicate a substantial advancement in how robotic tasks are taught and refined, promising improvements in operational safety, efficiency, and user engagement in robotic programming.
[project page] [paper] [video] [open-source: GitHub]
Imprinto: Enhancing Infrared Inkjet Watermarking for Human and Machine Perception
Martin Feick, Xuxin Tang, Raul Garcia-Martin, Alexandru Luchianov, Roderick Wei Xiao Huang, Chang Xiao, Alexa Siu, Mustafa Doga Dogan.
2025 ACM CHI Conference on Human Factors in Computing Systems
Hybrid paper interfaces leverage augmented reality to combine the desired tangibility of paper documents with the affordances of interactive digital media. Typically, virtual content can be embedded through direct links (e.g., QR codes); however, this impacts the aesthetics of the paper print and limits the available visual content space. To address this problem, we present Imprinto, an infrared inkjet watermarking technique that allows for invisible content embeddings only by using off-the-shelf IR inks and a camera. Imprinto was established through a psychophysical experiment, studying how much IR ink can be used while remaining invisible to users regardless of background color. We demonstrate that we can detect invisible IR content through our machine-learning pipeline, and we developed an authoring tool that optimizes the amount of IR ink on the color regions of an input document for machine and human detectability. Finally, we demonstrate several applications, including augmenting paper documents and objects.
[project page] [paper] [video] [talk] [Kaggle]
XR-penter: Material-Aware and In Situ Design of Scrap Wood Assemblies
Ramya Iyer, Mustafa Doga Dogan, Maria Larsson, Takeo Igarashi.
2025 ACM CHI Conference on Human Factors in Computing Systems
Woodworkers have to navigate multiple considerations when planning a project, including available resources, skill-level, and intended effort. Do it yourself (DIY) woodworkers face these challenges most acutely because of tight material constraints and a desire for custom designs tailored to specific spaces. To address these needs, we present XR-penter, an extended reality (XR) application that supports in situ, material-aware woodworking for casual makers. Our system enables users to design virtual scrap wood assemblies directly in their workspace, encouraging sustainable practices through the use of discarded materials. Users register physical material as virtual twins, manipulate these twins into an assembly in XR, and preview cuts needed for fabrication. We conducted a case study and feedback sessions to demonstrate how XR-penter supports improvisational workflows in practice, the type of woodworker who would benefit most from our system, and insights on integrating similar spatial and material considerations into future work.
[project page] [paper] [talk] [video]
Draw2Cut: Direct On-Material Annotations for CNC Milling
Xinyue Gui, Ding Xia, Wang Gao, Mustafa Doga Dogan, Maria Larsson, Takeo Igarashi.
2025 ACM CHI Conference on Human Factors in Computing Systems
Creating custom artifacts with computer numerical control (CNC) milling machines typically requires mastery of complex computer-aided design (CAD) software. To eliminate this user barrier, we introduced Draw2Cut, a novel system that allows users to design and fabricate artifacts by sketching directly on physical materials. Draw2Cut employs a custom-drawing language to convert user-drawn lines, symbols, and colors into toolpaths, thereby enabling users to express their creative intent intuitively. The key features include real-time alignment between material and virtual toolpaths, a preview interface for validation, and an open-source platform for customization. Through technical evaluations and user studies, we demonstrate that Draw2Cut lowers the entry barrier for personal fabrication, enabling novices to create customized artifacts with precision and ease. Our findings highlight the potential of the system to enhance creativity, engagement, and accessibility in CNC-based woodworking.
[project page] [paper] [talk] [video] [open-source: GitHub]
FontCraft: Multimodal Font Design Using Interactive Bayesian Optimization
Yuki Tatsukawa, I-Chao Shen, Mustafa Doga Dogan, Anran Qi, Yuki Koyama, Ariel Shamir, Takeo Igarashi.
2025 ACM CHI Conference on Human Factors in Computing Systems
Creating new fonts requires a lot of human effort and professional typographic knowledge. Despite the rapid advancements of automatic font generation models, existing methods require users to prepare pre-designed characters with target styles using font-editing software, which poses a problem for non-expert users. To address this limitation, we propose FontCraft, a system that enables font generation without relying on pre-designed characters. Our approach integrates the exploration of a font-style latent space with human-in-the-loop preferential Bayesian optimization and multimodal references, facilitating efficient exploration and enhancing user control. Moreover, FontCraft allows users to revisit previous designs, retracting their earlier choices in the preferential Bayesian optimization process. Once users finish editing the style of a selected character, they can propagate it to the remaining characters and further refine them as needed. The system then generates a complete outline font in OpenType format. We evaluated the effectiveness of FontCraft through a user study comparing it to a baseline interface. Results from both quantitative and qualitative evaluations demonstrate that FontCraft enables non-expert users to design fonts efficiently.
[project page] [paper] [talk] [video]
ImprovMate: Multimodal AI Assistant for Improv Actor Training
Riccardo Drago, Yotam Sechayk, Mustafa Doga Dogan, Andrea Sanna, Takeo Igarashi.
2025 ACM Designing Interactive Systems Conference (DIS) Work-in-Progress
Improvisation training for actors presents unique challenges, particularly in maintaining narrative coherence and managing cognitive load during performances. Previous research on AI in improvisation performance often predates advances in large language models (LLMs) and relies on human intervention. We introduce ImprovMate, which leverages LLMs as GPTs to automate the generation of narrative stimuli and cues, allowing actors to focus on creativity without keeping track of plot or character continuity. Based on insights from professional improvisers, ImprovMate incorporates exercises that mimic live training, such as abrupt story resolution and reactive thinking exercises, while maintaining coherence via reference tables. By balancing randomness and structured guidance, ImprovMate provides a groundbreaking tool for improv training. Our pilot study revealed that actors might embrace AI techniques if the latter mirrors traditional practices, and appreciate the fresh twist introduced by our approach with the AI-generated cues.
[project page] [paper] [video] [GitHub] [demo]
Augmented Object Intelligence with XR-Objects
Mustafa Doga Dogan, Eric J. Gonzalez, Karan Ahuja, Ruofei Du, Andrea Colaco, Johnny Lee, Mar Gonzalez-Franco, David Kim.
2024 ACM Symposium on User Interface Software and Technology (UIST)
2025 SXSW Innovation Awards Finalist
Seamless integration of physical objects as interactive digital entities remains a challenge for spatial computing. This paper explores Augmented Object Intelligence (AOI) in the context of XR, an interaction paradigm that aims to blur the lines between digital and physical by equipping real-world objects with the ability to interact as if they were digital, where every object has the potential to serve as a portal to digital functionalities. Our approach utilizes real-time object segmentation and classification, combined with the power of Multimodal Large Language Models (MLLMs), to facilitate these interactions without the need for object pre-registration. We implement the AOI concept in the form of XR-Objects, an open-source prototype system that provides a platform for users to engage with their physical environment in contextually relevant ways using object-based context menus. This system enables analog objects to not only convey information but also to initiate digital actions, such as querying for details or executing tasks. Our contributions are threefold: (1) we define the AOI concept and detail its advantages over traditional AI assistants, (2) detail the XR-Objects system’s open-source design and implementation, and (3) show its versatility through various use cases and a user study.
[project page] [Google Research page] [paper] [video] [open-source: GitHub]
Featured on Google Research Blog.
Speed-Modulated Ironing: High-Resolution Shade and Texture Gradients in Single-Material 3D Printing
Mehmet Ozdemir, Marwa AlAlawi, Mustafa Doga Dogan, Jose Castro, Stefanie Mueller, Zjenja Doubrovski.
2024 ACM Symposium on User Interface Software and Technology (UIST)
Best Demo Honorable Mention
We present Speed-Modulated Ironing, a new fabrication method for programming visual and tactile properties in single-material 3D printing. We use one nozzle to 3D print and a second nozzle to reheat printed areas at varying speeds, controlling the material’s temperature-response. The rapid adjustments of speed allow for fine-grained reheating, enabling high-resolution color and texture variations. We implemented our method in a tool that allows users to assign desired properties to 3D models and creates corresponding 3D printing instructions. We demonstrate our method with three temperature-responsive materials: a foaming filament, a filament with wood fibers, and a filament with cork particles. These filaments respond to temperature by changing color, roughness, transparency, and gloss. Our technical evaluation reveals the capabilities of our method in achieving sufficient resolution and color shade range that allows surface details such as small text, photos, and QR codes on 3D-printed objects. Finally, we provide application examples demonstrating the new design capabilities enabled by Speed-Modulated Ironing.
[project page] [paper] [video] [open-source: GitHub]
Featured on  MIT News, TU Delft News, 3D Printing Industry, 3DPrint.com.
MIT News, TU Delft News, 3D Printing Industry, 3DPrint.com.
MoiréWidgets: High-Precision, Passive Tangible Interfaces via Moiré Effect
Daniel Campos Zamora, Mustafa Doga Dogan, Alexa Siu, Eunyee Koh, Chang Xiao.
2024 ACM CHI Conference on Human Factors in Computing Systems
We introduce MoiréWidgets, a novel approach for tangible interaction that harnesses the Moiré effect—a prevalent optical phenomenon—to enable high-precision event detection on physical widgets. Unlike other electronics-free tangible user interfaces which require close coupling with external hardware, MoiréWidgets can be used at greater distances while maintaining high-resolution sensing of interactions. We define a set of interaction primitives, e.g., buttons, sliders, and dials, which can be used as standalone objects or combined to build complex physical controls. These consist of 3D printed structural mechanisms with patterns printed on two layers—one on paper and the other on a plastic transparency sheet—which create a visual signal that amplifies subtle movements, enabling the detection of user inputs. Our technical evaluation shows that our method outperforms standard fiducial markers and maintains sub-millimeter accuracy at 100 cm distance and wide viewing angles. We demonstrate our approach by creating an audio console and indicate how our approach could extend to other domains.
[project page] [doi] [paper] [video] [open-source: GitHub]
SpecTrack: Learned Multi-Rotation Tracking via Speckle Imaging
Ziyang Chen, Mustafa Doga Dogan, Josef Spjut, Kaan Akşit.
2024 SIGGRAPH Asia Poster
Best Poster Honorable Mention
Precision pose detection is increasingly demanded in fields such as personal fabrication, Virtual Reality (VR), and robotics due to its critical role in ensuring accurate positioning information. However, conventional vision-based systems used in these systems often struggle with achieving high precision and accuracy, particularly when dealing with complex environments or fast-moving objects. To address these limitations, we investigate Laser Speckle Imaging (LSI), an emerging optical tracking method that offers promising potential for improving pose estimation accuracy. Specifically, our proposed LSI-Based Tracking leverages the captures from a lensless camera and a retro-reflector marker with a coded aperture to achieve multi-axis rotational pose estimation with high precision. Our extensive trials using our in-house built testbed have shown that SpecTrack achieves an accuracy of 0.31° (std=0.43°) , significantly outperforming state-of-the-art approaches and improving accuracy up to 200%.
[project page] [doi] [paper] [poster] [video] [open-source: GitHub] [dataset]
BrightMarker: 3D Printed Fluorescent Markers for Object Tracking
Mustafa Doga Dogan, Raul Garcia-Martin, Patrick William Haertel, Jamison John O’Keefe, Ahmad Taka, Akarsh Aurora, Raul Sanchez-Reillo, Stefanie Mueller.
2023 ACM Symposium on User Interface Software and Technology (UIST)
Existing invisible object tagging methods are prone to low resolution, which impedes tracking performance. We present BrightMarker, a fabrication method that uses fluorescent filaments to embed easily trackable markers in 3D printed color objects. By using an infrared-fluorescent filament that “shifts” the wavelength of the incident light, our optical detection setup filters out all the noise to only have the markers present in the infrared camera image. The high contrast of the markers allows us to track them robustly regardless of the moving objects’ surface color.
We built a software interface for automatically embedding these markers for the input object geometry, and hardware modules that can be attached to existing mobile devices and AR/VR headsets. Our image processing pipeline robustly localizes the markers in real-time from the captured images.BrightMarker can be used in a variety of applications, such as custom fabricated wearables for motion capture, tangible interfaces for AR/VR, rapid product tracking, and privacy-preserving night vision. BrightMarker exceeds the detection rate of state-of-the-art invisible marking, and even small markers (1″x1″) can be tracked at distances exceeding 2m.
[project page] [doi] [paper] [video] [talk] [open-source: GitHub]
Featured on MIT News,  Hackster.io, Hackaday, and SwissCognitive.
Hackster.io, Hackaday, and SwissCognitive.
StructCode: Leveraging Fabrication Artifacts to Store Data in Laser-Cut Objects
Mustafa Doga Dogan, Vivian Hsinyueh Chan, Richard Qi, Grace Tang, Thijs Roumen Stefanie Mueller.
2023 ACM Symposium on Computational Fabrication (SCF)
We introduce StructCode, a technique to store machine-readable data in laser-cut objects using their fabrication artifacts. StructCode modifies the lengths of laser-cut finger joints and/or living hinges to represent bits of information without introducing additional parts or materials. We demonstrate StructCode through use cases for augmenting laser-cut objects with data such as labels, instructions, and narration. We present and evaluate a tag decoding pipeline that is robust to various backgrounds, viewing angles, and wood types. In our mechanical evaluation, we show that StructCodes preserve the structural integrity of laser-cut objects.
[paper] [doi] [video]
Featured on MIT News and Hackster.io.
StandARone: Infrared-Watermarked Documents as Portable Containers of AR Interaction and Personalization
M. Doga Dogan, Alexa F. Siu , Jennifer Healey, Curtis Wigington, Chang Xiao, Tong Sun
2023 ACM CHI Conference on Human Factors in Computing Systems LBW
Hybrid paper interfaces leverage augmented reality (AR) to combine the desired tangibility of paper documents with the affordances of interactive digital media. Typically, the instructions for how the virtual content should be generated are not an intrinsic part of the document but rather accessed through a link to remote resources. To enable hybrid documents to be portable containers of also the AR content, we introduce StandARone documents. Using our system, a document author can define AR content and embed it invisibly on the document using a standard inkjet printer and infrared-absorbing ink. A document consumer can interact with the embedded content using a smartphone with a NIR camera without requiring a network connection. We demonstrate several use cases of StandARone including personalized offline menus, interactive visualizations, and location-aware packaging.
[paper] [doi] [video] [talk]
InfraredTags: Invisible AR Markers & Barcodes Using Low-Cost, Infrared-Based 3D Printing & Imaging Tools
M. Doga Dogan, Ahmad Taka, Michael Lu, Yunyi Zhu, Akshat Kumar, Aakar Gupta, Stefanie Mueller
2022 ACM CHI Conference on Human Factors in Computing Systems
Best Demo Honorable Mention
Existing approaches for embedding unobtrusive tags inside 3D objects require either complex fabrication or high-cost imaging equipment. We present InfraredTags, which are 2D codes and markers imperceptible to the naked eye that can be 3D printed as part of objects, and detected rapidly by low-cost near-infrared cameras. InfraredTags achieve this by being printed from an infrared-transmitting filament which infrared cameras can see through, and by having air gaps inside for the tag’s bits which infrared cameras capture as darker pixels in the image. We built a user interface that facilitates the integration of common tags (QR codes, ArUco markers) with the object geometry to make them 3D printable as InfraredTags. We also developed a low-cost infrared imaging module that augments existing mobile devices and decodes tags using our image processing pipeline. We demonstrate how our method enables applications, such as object tracking and embedding metadata for augmented reality and tangible interactions.
[project page] [doi] [paper] [video] [talk] [open-Source: GitHub]
Featured on Popular Science, New Scientist, and MIT News.
SensiCut: Material-Aware Laser Cutting Using Speckle Sensing and Deep Learning
M. Doga Dogan, Steven Vidal Acevedo Colon, Varnika Sinha, Kaan Akşit, Stefanie Mueller
2021 ACM User Interface Software and Technology Symposium (UIST)
Laser cutter users face difficulties distinguishing between visually similar materials. This can lead to problems, such as using the wrong power/speed settings or accidentally cutting hazardous materials. To support users in identifying the sheets, we present SensiCut, a material sensing platform for laser cutters. In contrast to approaches that detect the appearance of the material with a conventional camera, SensiCut identifies the material by its surface structure using speckle sensing and deep learning. SensiCut comes with a compact hardware add-on for the laser cutter and a user interface that integrates material sensing into the cutting workflow. In addition to improving the traditional workflow, SensiCut enables new applications, such as automatically partitioning the design when engraving on multi-material objects or adjusting the shape of the design based on the kerf of the identified material. We evaluate SensiCut’s accuracy for different types of materials under different conditions, such as with various illuminations and sheet orientations.
[project page] [doi] [paper] [video] [talk]
Featured on  The Next Web,
The Next Web,  Photonics.com, and MIT News.
Photonics.com, and MIT News.
G-ID: Identifying 3D Prints Using Slicing Parameters
M. Doga Dogan, Faraz Faruqi, Andrew Day Churchill, Kenneth Friedman, Leon Cheng, Sriram Subramanian, Stefanie Mueller
2020 ACM CHI Conference on Human Factors in Computing Systems
G-ID is a method that utilizes the subtle patterns left by the 3D printing process to distinguish and identify objects that otherwise look similar to the human eye. The key idea is to mark different instances of a 3D model by varying slicing parameters that do not change the model geometry but can be detected as machine-readable differences in the print. As a result, G-ID does not add anything to the object but exploits the patterns appearing as a byproduct of slicing, an essential step of the 3D printing pipeline. We introduce the G-ID slicing & labeling interface that varies the settings for each instance, and the G-ID mobile app, which uses image processing techniques to retrieve the parameters and their associated labels from a photo of the 3D printed object. Finally, we evaluate our method’s accuracy under different lighting conditions, when objects were printed with different filaments and printers, and with pictures taken from various positions and angles.
[project page] [doi] [paper] [video] [talk]
Featured on  3DPrint.com, Hackster.io, and
3DPrint.com, Hackster.io, and  ITmedia (Japanese).
ITmedia (Japanese).
DefeXtiles: 3D Printing Quasi-Woven Fabric via Under-Extrusion
Jack Forman, Mustafa Doga Dogan, Hamilton Forsythe, Hiroshi Ishii
2020 ACM User Interface Software and Technology Symposium (UIST)
Best Demo Honorable Mention
We present DefeXtiles, a rapid and low-cost technique to produce tulle-like fabrics on unmodified fused deposition modeling (FDM) printers. The under-extrusion of filament is a common cause of print failure, resulting in objects with periodic gap defects. In this paper, we demonstrate that these defects can be finely controlled to quickly print thinner, more flexible textiles than previous approaches allow. Our approach allows hierarchical control from micrometer structure to decameter form and is compatible with all common 3D printing materials. In this paper, we introduce the mechanism of DefeXtiles and establish the design space through a set of primitives with detailed workflows. We demonstrate the interactive features and new use cases of our approach through a variety of applications, such as fashion design prototyping, interactive objects, aesthetic patterning, and single-print actuators.
[project page] [doi] [paper] [video] [talk]
Featured on  Gizmodo and MIT News.
Gizmodo and MIT News.
FoldTronics: Creating 3D Objects with Integrated Electronics Using Foldable Honeycomb Structures
Junichi Yamaoka, Mustafa Doga Dogan, Katarina Bulovic, Kazuya Saito, Yoshihiro Kawahara, Yasuaki Kakehi, Stefanie Mueller
2019 ACM CHI Conference on Human Factors in Computing Systems
FoldTronics is a 2D-cutting based fabrication technique to integrate electronics into 3D folded objects. The key idea is to cut and perforate a 2D sheet to make it foldable into a honeycomb structure using a cutting plotter; before folding the sheet into a 3D structure, users place the electronic components and circuitry onto the sheet. The fabrication process only takes a few minutes enabling users to rapidly prototype functional interactive devices. The resulting objects are lightweight and rigid, thus allowing for weight-sensitive and force-sensitive applications. Finally, due to the nature of the honeycomb structure, the objects can be folded flat along one axis and thus can be efficiently transported in this compact form factor. We describe the structure of the foldable sheet, and present a design tool that enables users to quickly prototype the desired objects. We showcase a range of examples made with our design tool, including objects with integrated sensors and display elements.
[project page] [doi] [paper] [video] [talk]
Featured on Hackster.io.
Magnetically Actuated Soft Capsule Endoscope for Fine-Needle Aspiration
Donghoon Son, Mustafa Doga Dogan, Metin Sitti
2017 IEEE International Conference on Robotics and Automation (ICRA)
Max Planck Institute for Intelligent Systems
Best Medical Robotics Paper Award Nomination
This paper presents a magnetically actuated soft capsule endoscope for fine-needle aspiration biopsy (B-MASCE) in the upper gastrointestinal tract. A thin and hollow needle is attached to the capsule, which can penetrate deeply into tissues to obtain subsurface biopsy sample. The design utilizes a soft elastomer body as a compliant mechanism to guide the needle. An internal permanent magnet provides a means for both actuation and tracking. The capsule is designed to roll towards its target and then deploy the biopsy needle in a precise location selected as the target area. B-MASCE is controlled by multiple custom-designed electromagnets while its position and orientation are tracked by a magnetic sensor array.
[doi] [pdf] [video]
Featured on  Engadget and
Engadget and  IEEE Spectrum.
IEEE Spectrum.